1 轨距尺介绍
1.1 应用
国铁:普速160 km/h以下、动车(160~250)km/h、高铁(160~350)km/h地铁/轻轨:平均速度60 km/h
1.2 技术参数
表 1 轨距尺测量范围
| 项目名称 | 测量范围 | 项目名称 | 测量范围 | ||
| 轨距 | 2级道尺类 | 1428~1470 | 超高 | 2级标尺类 | -150~+150 |
| 其他 | 1410~1470 | 其他 | -185~+185 | ||
| 查照间隔 | 1381~1401 | 护背距离 | 1338~1358 | ||
1.2.1 轨距(查照间隔、护背距离)零位:1435 mm(1391 mm、1348 mm),测量范围(略)1.2.2 超高2级标尺类:测量范围(-150 ~ +150)mm其他:测量范围(-185 ~ +185)mm󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
1.3 应用
线路日常维修需要控制轨距、超高几何参数,保证列车安全运行
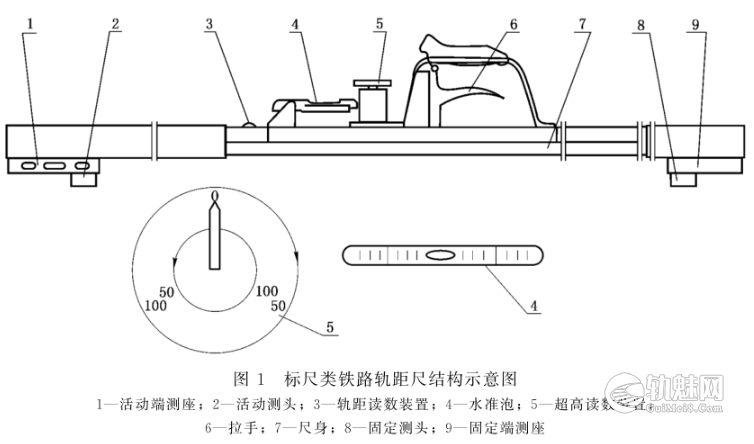
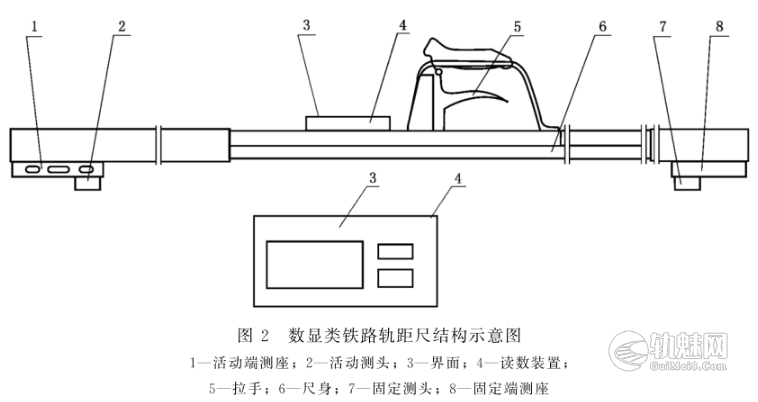
1.4 结构组成
标尺类和数显类,准确度等级0、1、2级
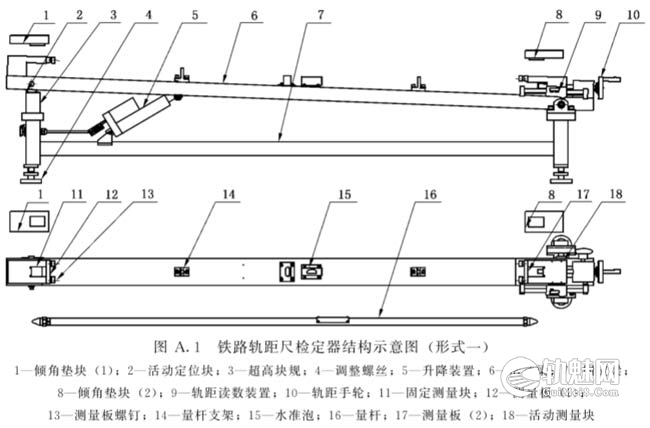
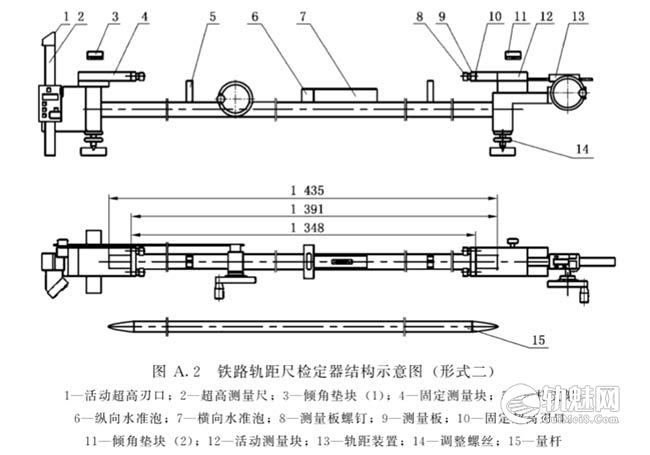
2 轨距尺检定器介绍
为轨距尺轨距、超高提供参考值准确度等级:Ⅰ级、Ⅱ级按结构分为:正弦原理、正切原理Ⅰ级可检定0、1、2级轨距尺Ⅱ级只能检定2级轨距尺
3 以水准泡为超高读数装置的超高零位示值误差的检定方法
不论轨距尺、检定器超高零位均与大地自然水平相一致
3.1 检定方法
3.1.1 调整检定器纵、横水准泡居中
3.1.2 轨距尺读数装置对零
3.1.3 轨距尺置于检定器上
第一次(掉转0°)读数:α1
第二次(掉转180°)读数:α2
第一次(掉转0°)读数水准泡位置
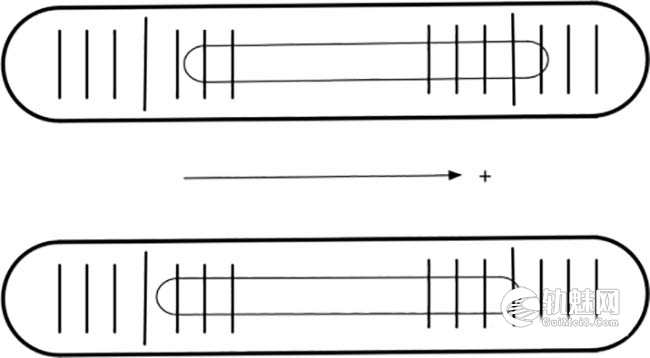
第二次(掉转180°)读数水准泡位置
3.1.4 零位示值误差计算公式:(α1 – α2)/ 2
3.2 检定方法由来
检定器本身存在零位示值误差
假设α1= a1 + δ;α2= a2 + δ
a1、a2分别为掉头前后轨距尺读数装置内在因素导致的水泡移动量。
(α1 – α2)/ 2=(a1 + δ – a2 – δ)/ 2=(a1 – a2)/ 2
此计算方法可消除由于检定器水平零位不准导致的系统误差。
按图所示α1 = +1.2格;α2 = +0.6格
假设δ = +1格
则a1 = + 0.2格;a2 = -0.4格
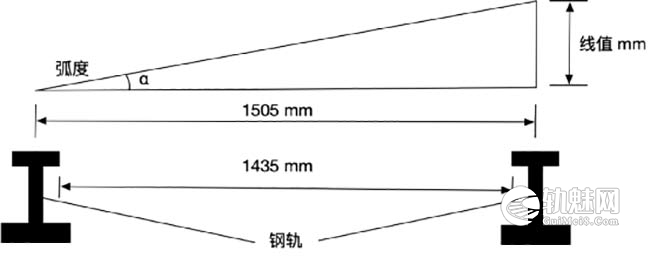
3.3 角值与线值的换算
2级轨距尺水准泡分度值是3(′),格值× 分度值为(′)(角度)
角度化弧度:1(′) = (1/60)° × 2π / 360°
线值=弧度× 1505 mm
3.3.1 检定规程6.3.9 a)中,超高零位示值误差公式
Δsp = (p1 + p2) / 2
p1、p2单位为mm [以轨距尺mm为单位]
[调整检定器纵、横水平泡,记录轨距尺示值p1,将轨距尺调转180°记录示值p2。由于数显类轨距尺内置角度传感器,角度转换为长度值,这一点有区别于标尺类轨距尺(机械结构原理)。也就是说数显类轨距尺有正负方向区分,即p1、p2读数有正负号]
3.3.2 检定规程6.3.9 b)中,超高零位示值误差公式
Δsp = kα × (α1 – α2)
[两次读数都在水平泡的同端进行,其符号相对于检定器的同一端,这是因为标尺类轨距尺无正负方向区分,即α1、α2读数无正负号。检定时读取水平泡α1、α2为角度单位,最终结果换算为长度单位]
α1、α2单位为(′) [以水准泡分度值(′)为单位]
kα为转换系数,0.2189 mm / (′)
kα = 1505 mm / 2 × (1/60)° × 2π / 360° / (′) = 0.2189 mm / (′)
4 轨距尺超高示值误差和重复性的处理方法
4.1 轨距尺超高工作原理分类
4.1.1 2级标尺类轨距尺
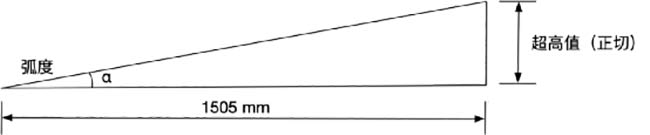
以正切原理显示超高测量值,设计时,保持两测座之间距离1505 mm为恒定值,其正切值为两测座高度差,并在超高读数装置上定度,即超高值。
4.1.2 0、1级数显类轨距尺
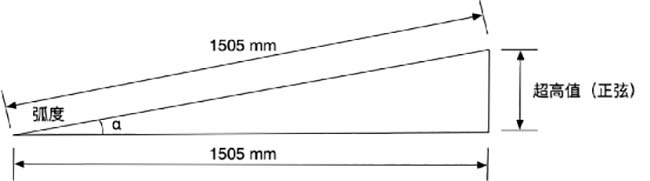
以正弦原理显示超高测量值,设计时,采用角度传感器,以1505 mm为恒定值,其正弦值在超高读数装置上显示出来,其显示值即超高值。
4.2 检定器超高工作原理分类
4.2.1 正弦原理:
以活动测量块一端为转轴,通过加垫标准块规升起另一端,形成超高,得到1505 mm的正弦值,即超高标准值。
4.2.2 正切原理:
活动测量块测量面至检定器另一端1505 mm处设一垂直超高尺,用量杆调整活动测量块位置,确保检定器复现的是1505 mm处的超高标准值。
4.3 轨距尺超高示值误差的数据处理
4.3.1 轨距尺与检定器原理相同直接比较,正弦检定器检定0、1级数显轨距尺;正切检定器检定2级标尺式轨距尺。
正弦原理:在检定 2级轨距尺时,应对轨距尺的超高示值误差进行附加修正,附加修正值见表7。
正切原理:在检定0级和1级轨距尺时,应对轨距尺的超高示值误差进行附加修正,附加修正值见表8。4.3.2 轨距尺与检定器原理不同
统一原理,再行比较
例1:正弦检定器检定2级标尺类轨距尺,首先确定原理误差。
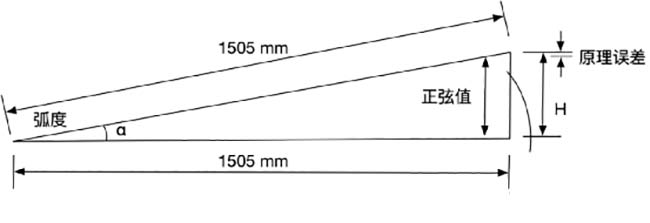
H——轨距尺任意检定点
其次确定修正值
修正值=正弦值- H;正弦值=1505 mm × sin α;tan α = H / 1505 mm
修正值为负数,与轨距尺示值相加,得到修正。
再者轨距尺修正后的示值与检定器示值进行比较。
例2:正切检定器检定0、1级数显类轨距尺,首先确定原理误差
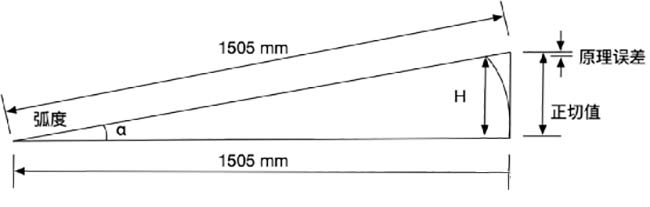
其次确定修正值
修正值=正切值- H;正切值= 1505 mm × tan α;sin α = H / 1505 mm
修正值为正数, 与轨距尺示值相加,得到修正。
再者轨距尺修正后的示值与检定器示值进行比较。
4.4 超高示值变化量测量方法和数据处理
将检定器超高调整至零位,将轨距尺置于检定器测量块顶面之上,记下轨距尺的超高示值b10,将轨距尺掉转180°,再按此置于检定器测量块顶面之上,记下轨距尺的超高示值b20;然后将倾角垫块可靠地置于检定器测量块顶面上并固定好,再将轨距尺置于倾角垫块上(与超高值b10对应的方向相同),并使其搭轨面与倾角垫块顶面接触,记下轨距尺的超高示值b11;将轨距尺掉转 180°,再按此置于倾角垫块上,记下轨距尺的超高示值b21,两次的示值变化量△1、△2按式下式计算:
△1 = | b11 – b10 |
△2 = | b21 – b20 |
取△1、△2的较大者为超高示值变化量
4.5 超高重复性数据处理
将检定器锁定在轨距尺超高测量范围内任意测量点上,再将轨距尺置于检定器上,反复测量超高5次,测量结果的最大值与最小值之差即为重复性。
重复性R = bmax– bmin
5 超高示值变动量控制的目的
我国山区铁路存在33/1000坡度线路,有坡度的线路仍然需要测量超高,在测量有坡度线路超高时,不应该对正常超高测量结果构成较大影响。33/1000坡度对应的角度值约1.89°,倾角垫块的斜度为2°,以模拟最大坡道线路倾斜,按照规程检定方法,测量并控制超高示值变动量
6 两测头之间绝缘电阻控制目的
铁路线路实行轨道电路控制自动化,列车通过信号机线路时,车轮接通轨道电路,信号灯由绿灯变红灯,实现对下一列车的通行控制,以保持两列车的车距。
日常轨距尺测量线路,不应该发生由于两侧头接触钢轨导致触发轨道线路的危险后果,轨距尺应有足够的绝缘性能。
7 轨距尺首次检定,超高、轨距两参数检定点数量盘点
7.1 2级标尺类轨距尺
超高:50 mm、100 mm、150 mm、任意一非零点,共4个点,掉头误差4个,示值误差8个;
轨距:1435 mm、1430 mm、1445 mm、1455 mm、1470 mm,共5个点,示值误差5个;
查照间隔:1391 mm,1个点,示值误差1个;护背距离:1348 mm,1个点,示值误差1个;
7.2 0、1级数显类轨距尺
超高:50 mm、100 mm、150 mm、180 mm、任意一非零点,共5个点,掉头误差5个,示值误差10个;
轨距:1435 mm、1410 mm、1425 mm、1445 mm、1455 mm、1470 mm,共6个点,示值误差5个;
查照间隔:1391 mm、1381 mm、1401 mm,共3个点,示值误差3个;
护背距离:1348 mm、1338 mm、1358mm,共3个点,示值误差3个;
8 轨距尺轨距参数示值误差解析
轨距尺尺身材质:铝合金:线膨胀系数为:22.6×10-6 /℃
检定器主体材质:钢 制:线膨胀系数为:11.5×10-6 /℃
两者检定温度偏离20℃时,需进行温度修正
8.1 修正方法
8.1.1 0、1级数显类轨距尺
自带温度传感器,可进行自动修正
8.1.2 2级标尺类轨距尺
纯机械结构,手工计算修正,修正值:kt × (t – 20℃)
kt =0.015 mm/℃(温度修正系数)
(22.6 × 10-6 /℃ – 11.5 × 10-6 /℃)× 1435 mm=0.016 mm/℃
为便计算,kt取0.015 mm/℃
8.2 示值误差处理方法
8.2.1 总偏差
△i=△Ls+△Lsi– kt × (t – 20℃)
总偏差=量杆偏差+检定器指示值-温度修正
8.2.2 轨距示值误差
△35i = L35i -(1435 mm +△i)
轨距示值误差=轨距尺轨距示值-(1435 mm +总偏差)
8.2.3 查照间隔
△91i = L91i -(1391 mm +△i)
查照间隔= 1435 mm – 44 mm = 1391 mm
8.2.4 护背距离
△48i = L48i -(1348 mm +△i)
护背距离= 查照间隔- 43 mm = 1348 mm



这篇文章详细介绍了轨距尺的应用和技术参数,提供了实用的检定方法和数据处理,对维护铁路安全和运行有重要意义。👍
水准泡的a1=+1.2,a2=+0.6是怎么读出来的呀?没弄明白