0 引言
既有铁路线路在长期的运营中,由于机车车辆和线路轨道的相互作用以及其他各种外力的影响,轨道中心会逐渐偏离原有设计线路,使得既有线路变得不再平顺。由于轨道曲线部分受到的横向轮轨力比直线部分大,影响列车运行的安全性和舒适度,所以曲线轨道的方向不平顺直接影响到列车运行的安全性和旅客舒适度。为了保持曲线轨道的平顺,必须对曲线方向及时整正。󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
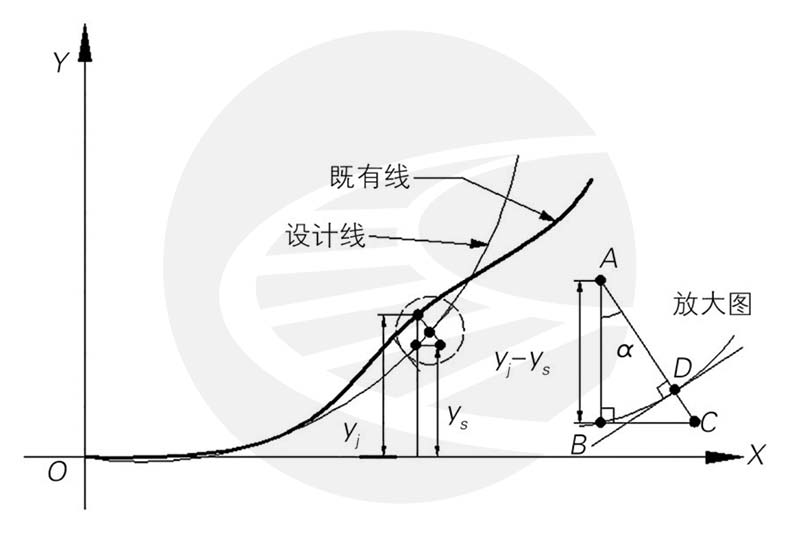
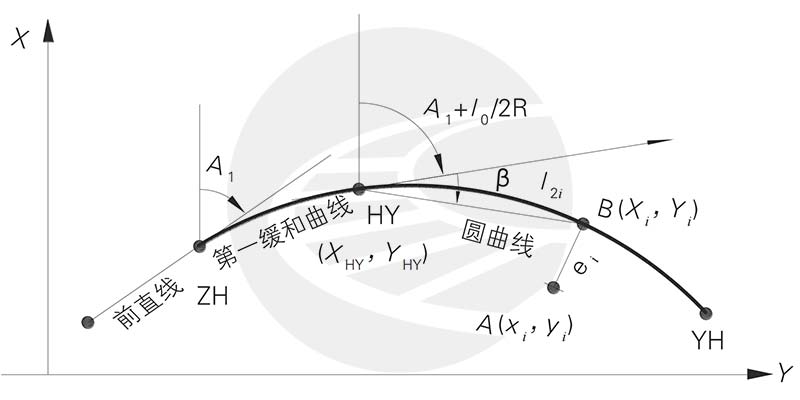
坐标法测量精度高、计算误差小,因此被广泛运用于曲线整正,近年有许多基于坐标法的曲线整正研究,秦方方等利用坐标的3次样条曲线出现的误差组合和影响因素提出了一种曲线整正方式。缪鹍等通过采用改进粒子群法获得线路平面参数来进行线路整正。根据既有线曲线变化率的原理,段晓峰等利用激光扫描仪得到的线路点云信息来进行曲线整正。Li等针对平面线形重构问题,提出了单曲线震荡迭代法。考虑传统坐标法曲线整正时只有3个变量条件,廖显军在此基础上提出增加扭转曲线两端切线方向参与整正的新方法,较传统方法效果更好。韩玉龙等通过拟合生成线路的模拟设计数据来实现线路整正。传统坐标法,在计算拨距时要将既有坐标进行转换,先转换成在以起点为坐标原点,前直线为󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹X轴的坐标系下的坐标值;计算第1缓和曲线和圆曲线的各测点拨距时,再将坐标转换成以ZH点为坐标原点的传统坐标系,进行计算;计算第2缓和曲线时再转换成以HZ点为坐标原点,后直线为󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹X轴的坐标系,才能用公式进行计算各测点的拨距值。计算较为繁琐,并且在计算缓和曲线拨距的公式中采用了近似计算(见图1),利用弦长代替弧长的办法确定角度,而且计算了近似角度的余弦值,这会使曲线整正的拨距计算结果存在误差。当缓和曲线的偏角较小时,这种误差影响可以忽略不记,但当偏角较大时,这种误差是不可忽视的,它对曲线整正有一定的影响。󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
综合既有研究,并考虑传统方法存在的误差,提出在整体坐标系下利用既有坐标计算拨距的一种新方法,该方法不再进行坐标转换,直接运用既有坐标在大地坐标系下计算拨距。利用这种方法计算的缓和曲线处拨距,可以有效克服传统方法计算中的余弦值近似误差。󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
计算拨距前先要进行线路线形区分。通过计算各测点的曲率、计算方位角变化率、3次样条等方法,对实测数据进行判别,利用这些计算结果的变化规律可粗略判断出直缓点ZH、缓圆点HY、圆缓点YH和缓直点HZ的位置,并且近似确定第1和第2缓和曲线的长度。考虑实际现场的情况,要求第1和第2缓和曲线等长,计算两者平均值作为初次的缓和曲线长。󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
由于目标函数为各点的拨距平方和\(\sum_{n}^{1} e^{2}_i\),具有明确的解析表达式,因此采用优化理论进行拨距优化,根据线路情况给定半径R、缓和曲线长l0的初值,经过迭代得到目标函数值最小R和l0的最优组合,通过最优的R和l0组合计算出曲线的拨距值,并且得到各主点的里程。
1 传统坐标法的拨距计算方法
传统的拨距计算方法主要采用以坐标转换为基础的坐标法,通过将大地坐标转换成工程坐标来计算测点的拨距(见图2)。
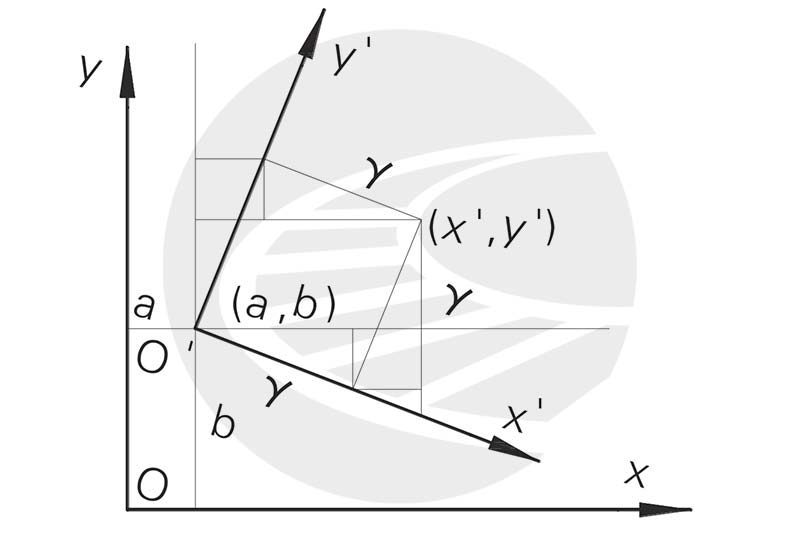
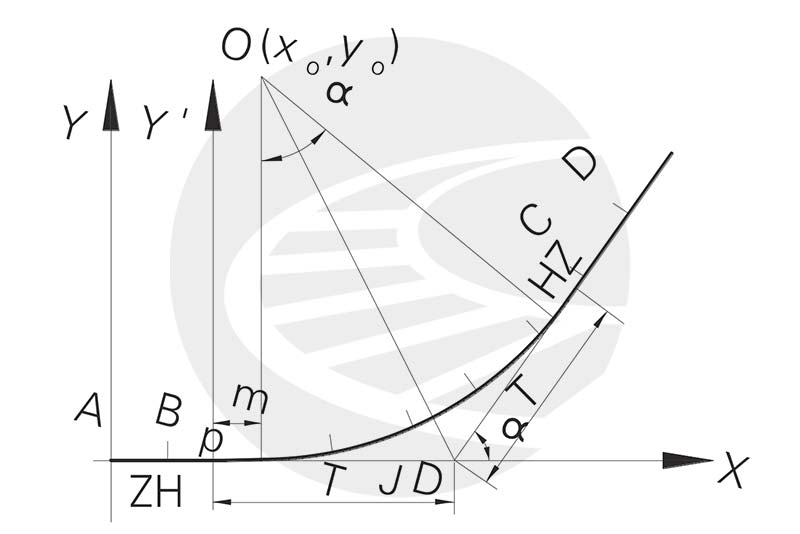
图2 坐标转换示意图
图2中,O′为坐标转换后的坐标原点,x′、y′为工程坐标轴,A、B为前直线上2点,C、D为后直线上的2点。则转换公式利用下式计算:
$$\left\{\begin{matrix} x^{\prime}=\left(x-x_{A}\right) \cos \left(A_{A B}\right)+\left(y-y_{A}\right) \sin \left(A_{A B}\right) \\ y^{\prime}=\left(x-x_{A}\right) \sin \left(A_{A B}\right)-\left(y-y_{A}\right) \cos \left(A_{A B}\right) \end{matrix}\right. \qquad (式1)$$ 󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
式中:xA,yA为A点的既有坐标;x,y为待求点的既有坐标;AAB为直线AB的方位角。
在计算拨距前,要将前文转换后的工程坐标系原点再次移动到ZH点处[见图2(b)],各既有点经过坐标转换后的坐标x″i,y″i为:
$$(x_i^{\prime\prime},y_i^{\prime\prime})=(x_i^{\prime}-x_{\mathrm{ZH}},y_i^{\prime}) \qquad (式2)$$ 󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
圆心O′坐标变为:
$$(x_O^{\prime},y_O^{\prime})=(l_0/2,R+P) \qquad (式3)$$
式中:xZH为坐标原点移动前直缓点坐标;P为内移距。
如果用Li表示计算点的里程,则各个测点的拨距Δ计算如下式:
$$\Delta = \begin{cases} y_i”, L_i < L_{ZH} \\ \left( y_i'' - \frac{x_i'''}{6Rl_0} \right) / \cos \left( \frac{(L_i - L_{ZH})^2}{2Rl_0} \right), L_{ZH} \le L_i < L_{HY} \\ R - \sqrt{(x_0' - x_i'')^2 + (y_0' - y_i'')^2}, L_{HY} \le L_i < L_{YH} \\ \left\{ (x_{HZ}' - x_i'') \sin \alpha - (y_{HZ}' - y_i'') \cos \alpha - \right. \\ \left\{ \frac{[(x_{HZ}' - x_i'') \cos \alpha + (y_{HZ}' - y_i'') \sin \alpha]^3}{6Rl_0} \right\} \cos \left( \frac{(L_{HZ} - L_i)^2}{2Rl_0} \right), L_{YH} \le L_i < L_{HZ}\\ (x_{HZ}' - x_i'') \sin \alpha - (y_{HZ}' - y_i'') \cos \alpha, L_i \ge L_{HZ} \end{cases} \qquad (式4)$$ 󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
式中:LZH分别为直缓点、缓圆点、圆缓点、缓直点的里程;α为曲线转角;x′HZ,y′HZ为坐标原点移动到ZH点后的HZ点的坐标。
式(4)为传统坐标法的拨距计算方法,在第1、第2缓和曲线内转换坐标计算拨距时,余弦后的角度是近似的方法得到的,这在求解分母位置的余弦值后得出的测点拨距值会存在一定的误差。因此,下文介绍一种不再使用近似角度避免误差的新方法。󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
2 拨距计算新方法
在整体坐标系下,利用既有坐标推导出新的计算公式,不再使用坐标转换后的计算方法,将曲线的公式推导分为4个部分:前直线部分、第1缓和曲线部分、圆曲线部分、第2缓和曲线部分(见图3-图5)。󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
2.1 前直线内(ZH点前)拨后坐标
设ZH点前直线上任意一点的里程为Li,ZH点的里程为LZH,则前直线上计算点的拨后坐标(Xi,Yi)计算公式为:
$$\begin{cases} X_i = X_{\mathrm{J}} + (T + L_{\mathrm{ZH}} – L_i)\cos(A_1 + 180^{\circ}) \\ Y_i = Y_{\mathrm{J}} + (T + L_{\mathrm{ZH}} – L_i)\sin(A_1 + 180^{\circ}) \end{cases} \qquad (式5)$$ 󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
式中:A1、T分别为前直线的方位角和切线长;(XJ,YJ)为交点坐标。
对于后直线上一点的拨后坐标,只需将式(5)中的相应里程改为后直线上点的里程,并将式中角度改为后直线方位角A2即可。
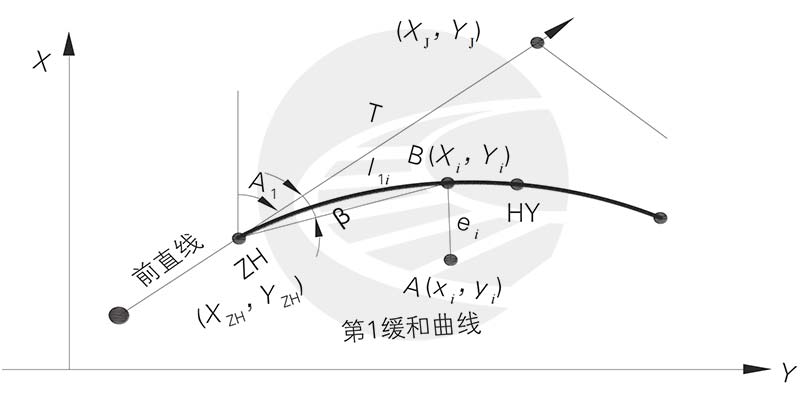
2.2 第一缓和曲线内(ZH-HY)拨后坐标
图3中,(XZH,YZH)是第1缓和曲线上ZH点的坐标,A(xi,yi)为ZH—HY内任意点的既有坐标,B(Xi,Yi)是该点沿径向拨动的拨后坐标。
缓和曲线上任意点拨后坐标(Xi,Yi)满足式(6):
$$\left\{\begin{array}{l}{{X_{i}=X_{\mathrm{ZH}}+{l_{1i}}/\cos\big(\frac{{{l_{1i}}}^{2}}{6R{l_{0}}}\big)\cos\big(A_{1}+\zeta\frac{{{l_{1i}}}^{2}}{6R{l_{0}}}\big)}}\\ {{Y_{i}=Y_{\mathrm{ZH}}+{l_{1i}}/\cos\big(\frac{{{l_{1i}}}^{2}}{6R{l_{0}}}\big)\sin\big(A_{1}+\zeta\frac{{{l_{1i}}}^{2}}{6R{l_{0}}}\big)}}\end{array}\right. \qquad (式6)$$ 󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
式中:ζ为曲线左右偏判断值,右偏为1,左偏为-1;l1i为第1缓和曲线上任意计算点到ZH点的缓和曲线长。
ZH点的拨后坐标值(XZH,YZH)可由下式计算:
$$\left\{\!\!\begin{array}{l l}{{X_{\mathrm{ZH}}=X_{\mathrm{J}}+\,T\cos\left(\,A_{\mathrm{1}}+\,180^{\circ}\right)}}\\ {{Y_{\mathrm{ZH}}=Y_{\mathrm{J}}+\,T\sin\left(\,A_{\mathrm{1}}+\,180^{\circ}\right)}}\end{array}\!\!\!\right.^{\circ} \qquad (式7)$$ 󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
在式(6)中要得到利用既有坐标求解任意点的拨后坐标,关键要求式中的l1i,可以通过求解经过拨后曲线点和既有测量点的直线方程得到,过程如下:
首先计算出拨后曲线上ZH—HY内某点的切线斜率,通过计算方位角正切值得到:
$$K_{\mathrm{\scriptsize{J}}}=\tan\left(\,A_{1}+\zeta\,\frac{l_{1i}^{2}}{6R l_{0}}\,\right)\ \qquad (式8)$$ 󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
得到切线斜率后,就可以得到经过拨后点和既有测点的直线方程斜率:
$$K_{i}=\!-1/\tan\!\left(\,A_{1}+\zeta\,\frac{l_{1i}^{2}}{6R l_{0}}\,\right)\ \qquad (式9)$$ 󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
则过拨后曲线点和既有测量点的直线方程为:
$$Y_{i}=K_{i}(\,X_{i}\,-\,x_{i}\,)+\,y_{i} \qquad (式10)$$
将式(6)代入式(10)中,可以解得只带有未知量l1i的等式方程:
$$Y_{ZH} + l_{1i}/\cos(\frac{l_{1i}^2}{6Rl_0})\sin(A_1 + \zeta\frac{l_{1i}^2}{6Rl_0}) + \\ \frac{1}{\tan(A_1 + \zeta\frac{l_{1i}^2}{6Rl_0})}\{X_{ZH} + l_{1i}/\cos(\frac{l_{1i}^2}{6Rl_0})\times \\ \cos(A_1 + \frac{l_{1i}^2}{6Rl_0}) – x_i\} – y_i = 0 \qquad (式11)$$ 󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
由于式中只有l1i为未知量,可直接求出。将求出的l1i代入式(6)中,就可以得到在ZH—HY内的一点的拨后坐标。
2.3 圆曲线内(HY-YH)拨后坐标
对于圆曲线内一点的拨后坐标计算见图4,(XHY,YHY)是缓圆点的拨后坐标,A(xi,yi)是圆曲线段内任意点的既有坐标,B(Xi,Yi)是拨后坐标。
圆曲线内任意点拨后坐标(Xi,Yi)满足下式:
$$\left\{\begin{array}{l}{{X_{i}=X_{\mathrm{HY}}+2R\sin\big(\frac{l_{2i}}{2R}\big)\cos\big(A_{1}+\zeta\,\frac{l_{0}+l_{2i}}{2R}\big)}}\\ {{Y_{i}=Y_{\mathrm{HY}}+2R\sin\big(\frac{l_{2i}}{2R}\big)\sin\big(A_{1}+\zeta\,\frac{l_{0}+l_{2i}}{2R}\big)}}\end{array}\right. \qquad (式12)$$ 󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
式中:l2i为圆曲线上任意计算点到HY点的圆曲线长。
缓圆点的拨后坐标(XHY,YHY)可由式(13)得到。
$$\left\{\begin{array}{l}{{\displaystyle X_{\mathrm{HY}}=X_{\mathrm{ZH}}+x_{\mathrm{HY}}/\cos\big(\,\frac{l_{0}}{6R}\big)\cos\big(A_{1}+\zeta\frac{l_{0}}{6R}\big)}}\\ {{\displaystyle Y_{\mathrm{HY}}=Y_{\mathrm{ZH}}+x_{\mathrm{HY}}/\cos\big(\,\frac{l_{0}}{6R}\big)\sin\big(A_{1}+\zeta\frac{l_{0}}{6R}\big)}}\end{array}\right. \qquad (式13)$$ 󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
式中:xHY 为 HY 点的切线横距,计算方法为:\(x_{HY}={\cal L}{0}-{\frac{{l}{0}^{3}}{40R^{2}}}\)
HY—YH内任意点切线斜率为:
$$K_{\mathrm{J}}=\tan\left(\,A_{_1}+\zeta\,\frac{l_{_0}+2l_{_{2i}}}{2R}\,\right)\ \qquad (式14)$$ 󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
过拨后曲线点和既有测量点的直线斜率为:
$$K_{i}=\,-\,1/\tan\left(\,A_{1}\,+\,\zeta\,\frac{l_{0}\,+\,2l_{2i}}{2R}\,\right)\ \qquad (式15)$$ 󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
过拨后曲线点和既有测量点的直线方程为:
$$Y_{i}=K_{i}(\,X_{i}-\,x_{i}\,)+y_{i} \qquad (式16)$$
将式 (12) 代入直线方程 (16)中整理得含有自变量l2i的方程:
$$Y_{HY}+2R\sin\left(\frac{l_{2i}}{2R}\right)\sin\left(A_1+\zeta\frac{l_0 + l_{2i}}{2R}\right)+ \\ \frac{1}{\tan\left(A_1+\zeta\frac{l_0 + 2l_{2i}}{2R}\right)}\left\{X_{HY}+2R\sin\left(\frac{l_{2i}}{2R}\right)\times \\ \cos\left(A_1+\zeta\frac{l_0 + l_{2i}}{2R}\right)-x_i\right\}-y_i = 0 \qquad (式17)$$ 󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
通过式(17)可以求出l2i,将l2i代入式(12)中,得到HY—YH内任意点拨后坐标
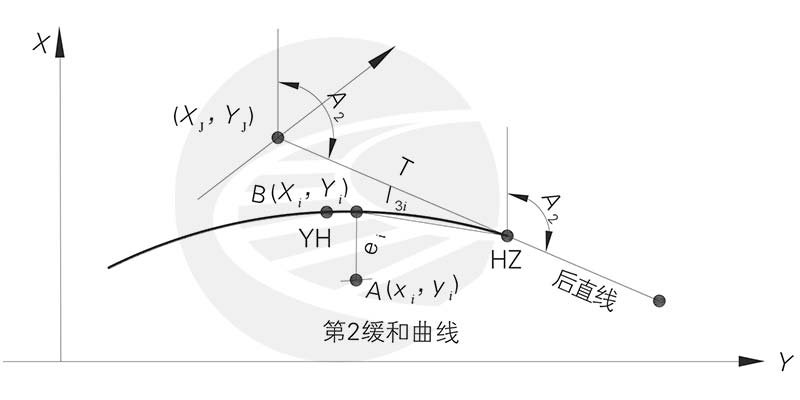
2.4 第2缓和曲线内(YH—HZ)拨后坐标
图5中,(XHZ,YHZ )是缓直点的坐标,B(Xi,Yi )是第2缓和曲线内任意点的拨后坐标,A(xi,yi)是第2缓和曲线内既有坐标,A2为后直线的方位角,关于第2缓和曲线的拨后坐标(Xi,Yi)计算如下:
$$\left\{ \begin{array}{l} X_{i}=X_{\mathrm{HZ}}+l_{3i}/\cos\left(\frac{l_{3i}^{2}}{6Rl_{0}}\right)\cos\left(A_{2}+\pi-\zeta\frac{l_{3i}^{2}}{6Rl_{0}}\right)\\ Y_{i}=Y_{\mathrm{HZ}}+l_{3i}/\cos\left(\frac{l_{3i}^{2}}{6Rl_{0}}\right)\sin\left(A_{2}+\pi-\zeta\frac{l_{3i}^{2}}{6Rl_{0}}\right) \end{array} \right. \qquad (式18)$$ 󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
式中:l3i为YH—HZ内任意点至HZ点曲线长,计算公式为:
$$\begin{cases} X_{\mathrm{HZ}} = X_{\mathrm{J}} + T\cos A_{2} \\ Y_{\mathrm{HZ}} = Y_{\mathrm{J}} + T\sin A_{2} \end{cases} \qquad (式19)$$ 󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
直线斜率为:
$$K_i=-1/\tan(A_2 – \zeta\frac{l_{3i}^2}{6Rl_0}+\pi) \qquad (式20)$$
直线方程为:
$$Y_i = K_i (X_i – x_i) + y_i \qquad (式21)$$
含有自变量l3i的方程式:
$$Y_{HZ} + l_{3i} / \cos\left(\frac{l_{3i}^2}{6Rl_0}\right) \sin\left(A_2 + \pi – \zeta\frac{l_{3i}^2}{6Rl_0}\right) + \frac{1}{\tan\left(A_2 – \zeta\frac{l_{3i}^2}{6Rl_0} + \\ \pi\right)} \left\{X_{HZ} + l_{3i} / \cos\left(\frac{l_{3i}^2}{6Rl_0}\right) \times \\ \cos\left(A_2 + \pi – \zeta\frac{l_{3i}^2}{6Rl_0}\right) – x_i\right\} – y_i = 0 \qquad (式22)$$ 󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
将式(22)求出的l3i代入式(18)中,可以求出YH—HZ内任意点的拨后坐标。
2.5 拨距计算
通过计算既有坐标和拨后坐标的距离,可以得到各个点的拨距ei的值,向外拨时拨距为正值,向内拨时拨距为负值。
当曲线右偏时:
$$e_i = \begin{cases} \sqrt{(X_i – x_i)^2 + (Y_i – y_i)^2}, & Y_i < y_i \\ \sqrt{(X_i - x_i)^2 + (Y_i - y_i)^2}, & Y_i \geq y_i \end{cases} \qquad (式23)$$ 󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
对于左偏曲线,拨距正负值与右偏曲线相反。
3 算例分析
运用上述计算过程,选取大量现场实测曲线坐标为试验数据,对于每一条曲线,采用相同的曲线要素,编制程序进行计算,分析利用新方法计算出的拨距和拨后正矢与传统坐标法的差值,得到在缓和曲线偏角󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹β不同时,传统坐标系下坐标法因为计算近似余弦值而产生的误差大小。
计算试验曲线的拨距和拨后正矢,并减去传统坐标法计算出的拨距和拨后正矢,其中试验曲线的整体影响图见图6。
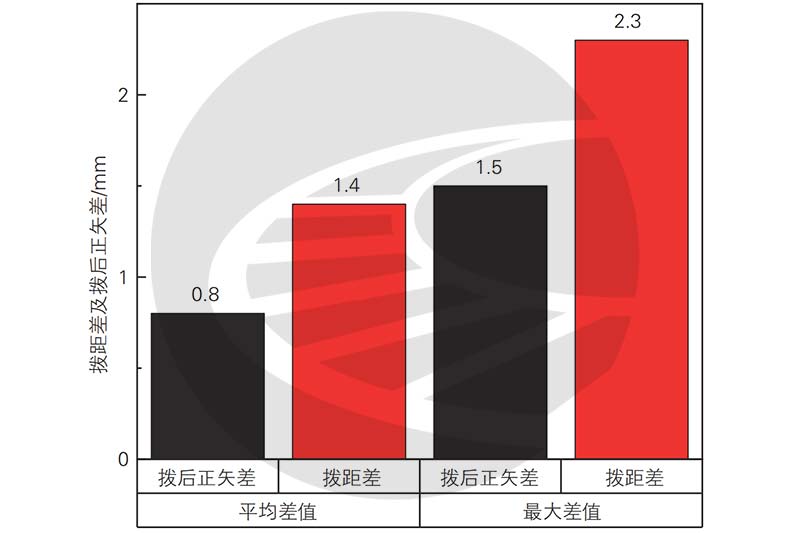
从图6中可知,新方法和传统坐标法对曲线计算后,拨距的最大差值为2.3mm,平均差值为1.4mm;拨后正矢的最大差值为1.5mm,平均差值为0.8mm。结果表明,传统坐标法由于余弦值近似的问题,相比新方法在拨距和拨后正矢的计算结果上产生了一定的误差。󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
为了便于分析,选取众多曲线中的6条有代表性的曲线作为样本(见图7—图12)。
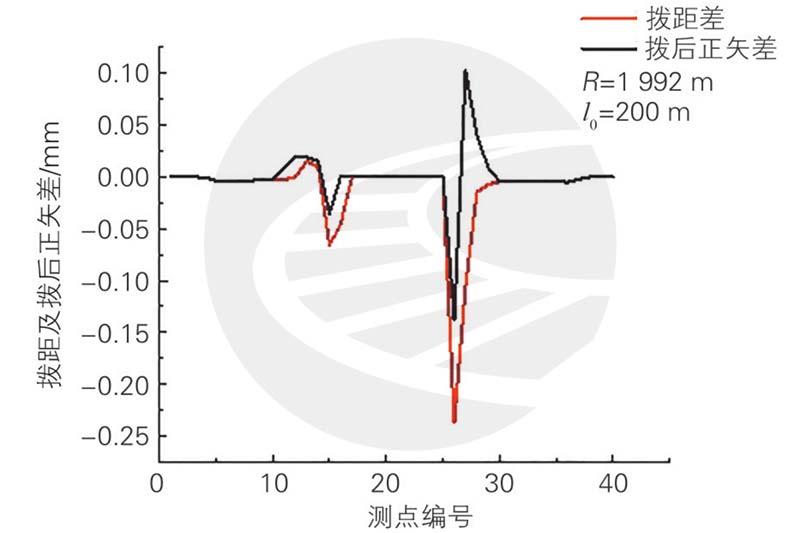
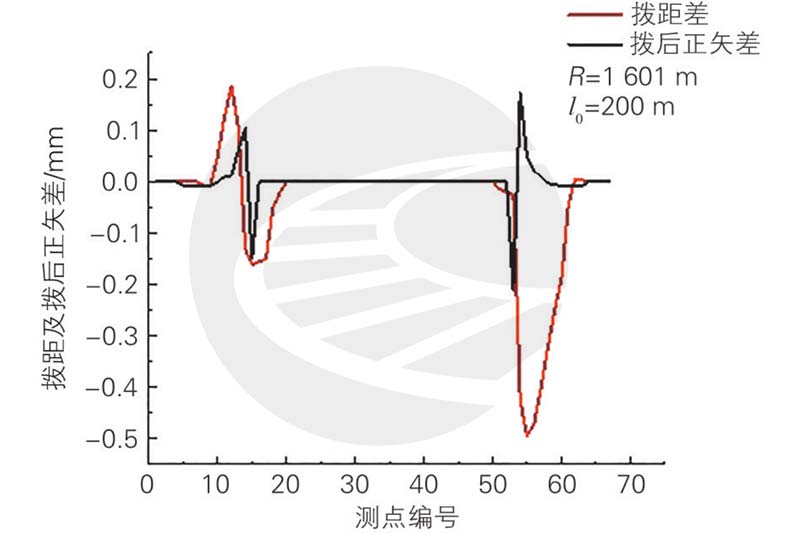
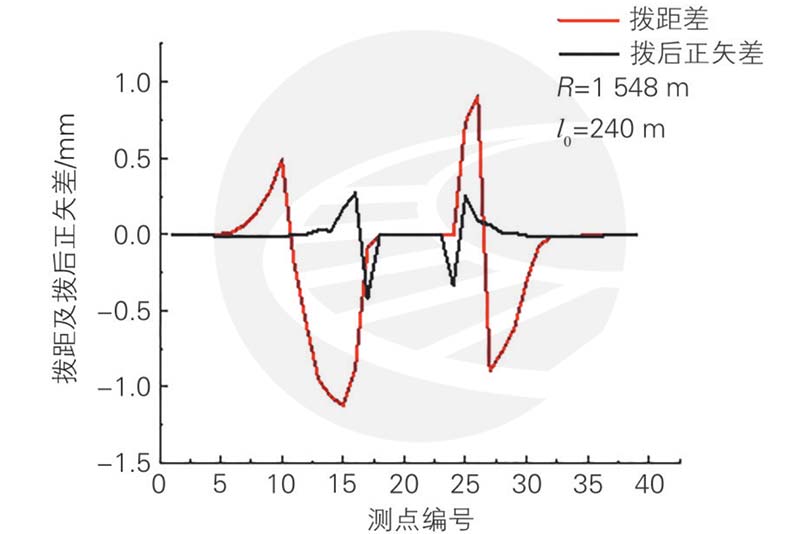
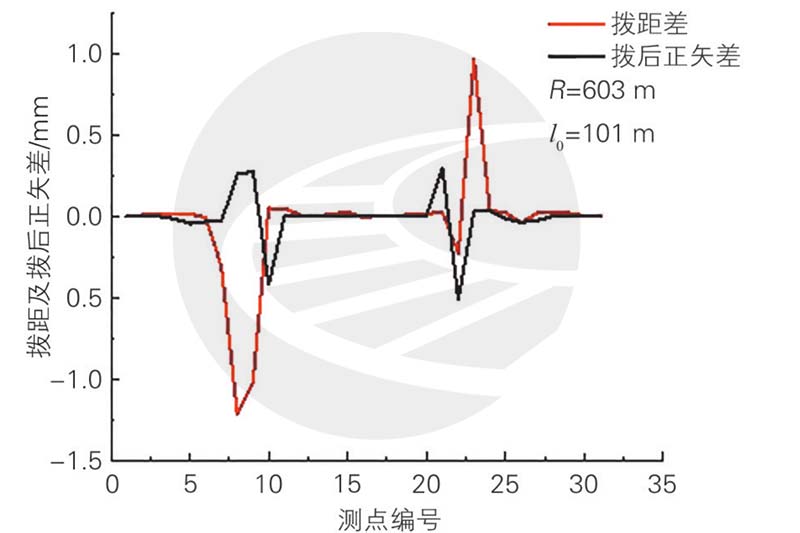
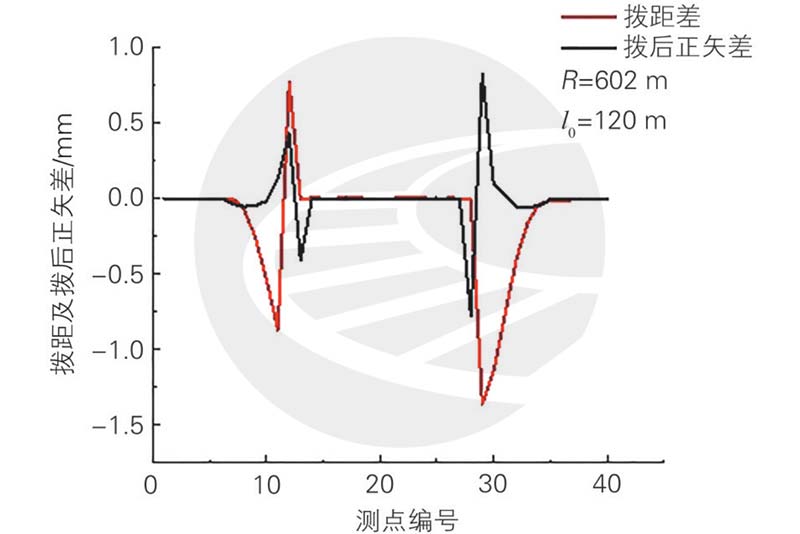
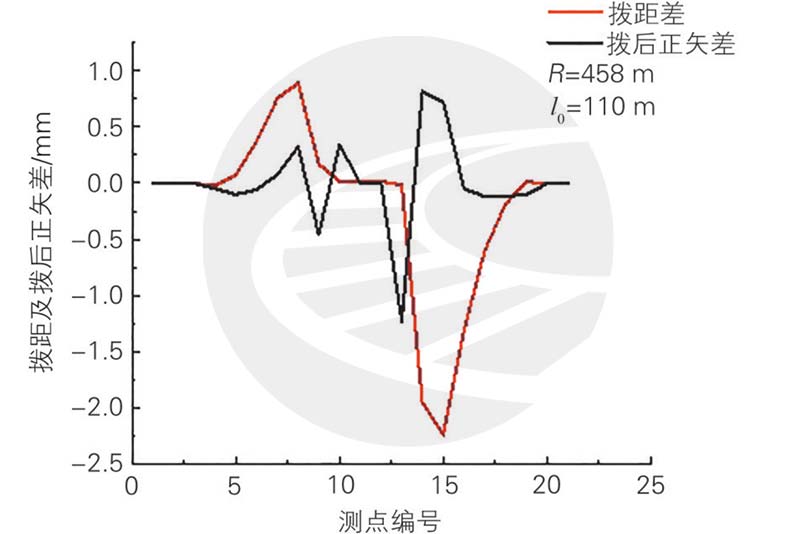
3.1 拨距误差分析
相同曲线要素下通过2种方法计算拨距值,并结合图7—图12可知,在缓和曲线偏角为2.9°时,拨距差的最大值约为0.24mm,这代表新方法的拨距结果相比于传统的方法,克服了因分母位置余弦值近似而产生的0.24mm的拨距误差;在偏角为3.6°时,新方法消除的拨距误差最大值近似为0.5mm;在偏角为4.4°及4.8°时,新方法消除的拨距最大误差分别为1mm和1.24mm;在偏角达到5.7°时,传统方法存在的拨距最大误差接近1.5mm;而当缓和曲线偏角为6.9°时,利用整体坐标系下坐标求得的拨距和在传统坐标法下计算的拨距差值上升到了大约2.3mm。从上述分析中可知,随着缓和曲线偏角的增大,传统坐标法计算时出现的拨距误差在逐渐上升,而新方法可以精确的计算曲线的拨距值。󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
3.2 拨距正矢误差分析
拨后正矢是衡量曲线拨后圆顺程度的一个指标,因此对于拨后正矢误差的分析是重要的。拨后正矢误差计算式如下:
式中:Δf为拨后正矢误差;Δei为任意测点i的拨距误差。
根据式(24)计算出实测曲线的拨后正矢误差,选取与分析拨距误差时相同的曲线,并同样绘制在上图7—图12中作为对比图形。分析可知,当缓和曲线偏角为2.9°时,拨后正矢最大差值约为0.13mm,表明新方法克服了传统方法产生的0.13mm的拨后正矢误差;随着偏角增大到3.6°,新方法克服的拨后正矢最大误差增加到了0.2mm;当缓和曲线偏角为4.4°时,克服传统方法的拨后正矢最大误差约为0.4mm;当缓和曲线偏角度数上升为4.8°时,克服的误差为0.5mm;当缓和曲线偏角为5.7°时,传统方法产生的1.0mm的拨后正矢误差被新计算方法所克服;而当偏角增加到6.9°时,新方法克服的拨后正矢最大误差也达到了1.5mm。󠅅󠅃󠄵󠅂󠄪󠇖󠆨󠆨󠇕󠆞󠆒󠅬󠇘󠆭󠆘󠇙󠆝󠅵󠇗󠆭󠆁󠄐󠇗󠅹󠅸󠇖󠆍󠅳󠇖󠅹󠅰󠇖󠆌󠅹
根据以上分析可知,新方法避免了传统方法因为分母位置余弦值的近似而产生的拨后正矢误差,并且随着缓和曲线偏角的增大,避免的这部分拨后正矢误差也会随之增加。
4 结论
(1)提出的利用整体坐标系下的既有坐标直接计算曲线拨距的新方法,使直线和曲线的优化都在同一坐标系下,曲线的优化不需再进行坐标转换。
(2)新方法克服了传统坐标法计算出的拨距和拨后正矢存在的误差,并且克服的误差值随着缓和曲线偏角的增加而增大。
文章来源
原文名称:整体坐标系下既有铁路曲线拨距计算新方法
作者信息:刘永孝1, 邢少伟1,2, 韩峰1 (兰州交通大学 土木工程学院,甘肃 兰州 730070;辽宁省高速公路运营管理有限责任公司 阜新分公司,辽宁 阜新 123000)
期刊信息:《中国铁路》2025年第8期


